Celda CNC con Robot Colaborativo
Una solución completa para lograr que un CNC trabaje de manera autónoma, sin la necesidad de que un operario esté frente a la máquina, permitiendo operación continua y monitoreo remoto.
El Problema
En 2023, AERRE atravesaba un período de gran demanda con altos picos de producción Pese a que la planta se encuentra en un Parque Industrial, la propuesta de trabajar un medio turno adicional no prosperó.
Surgió entonces una idea: si las máquinas pudieran continuar operando solas, asistidas por un brazo robótico que las alimente, sería posible mantener la producción activa después del horario laboral y monitorearla por los mismos operarios de forma remota.

Desafíos
Alta variedad, bajo volumen
Las piezas variaban en diámetro y longitud, con lotes promedio de 20 piezas cada uno.
Tolerancias acotadas
Las tolerancias de terminación de las piezas eran del orden de la centésima.
Compensación de desgaste
Sistema que compense el desgaste y rotura de herramientas de corte.
Configuración simplificada
Software que permita al operario configurar los lotes de piezas de manera sencilla y simple.
Interconexión de sistemas
Obtener datos de las piezas a través de un sistema de gestión y vincularlo con el software de herramental.
Inteligencia centralizada
Necesitábamos un tipo de inteligencia centralizada para coordinar todos los componentes.
Desarrollo Completo de la Celda
Desde Autentio desarrollamos la celda completa, incluyendo toda la ingeniería necesaria y los planos técnicos para enviar a fabricar. Nuestro equipo se encargó de diseñar cada componente de la celda, asegurando que cumpliera con todos los requerimientos técnicos y de seguridad.
Realizamos la conexión entre el CNC y el PLC, estableciendo la comunicación necesaria para que ambos sistemas trabajen de manera coordinada y sincronizada.
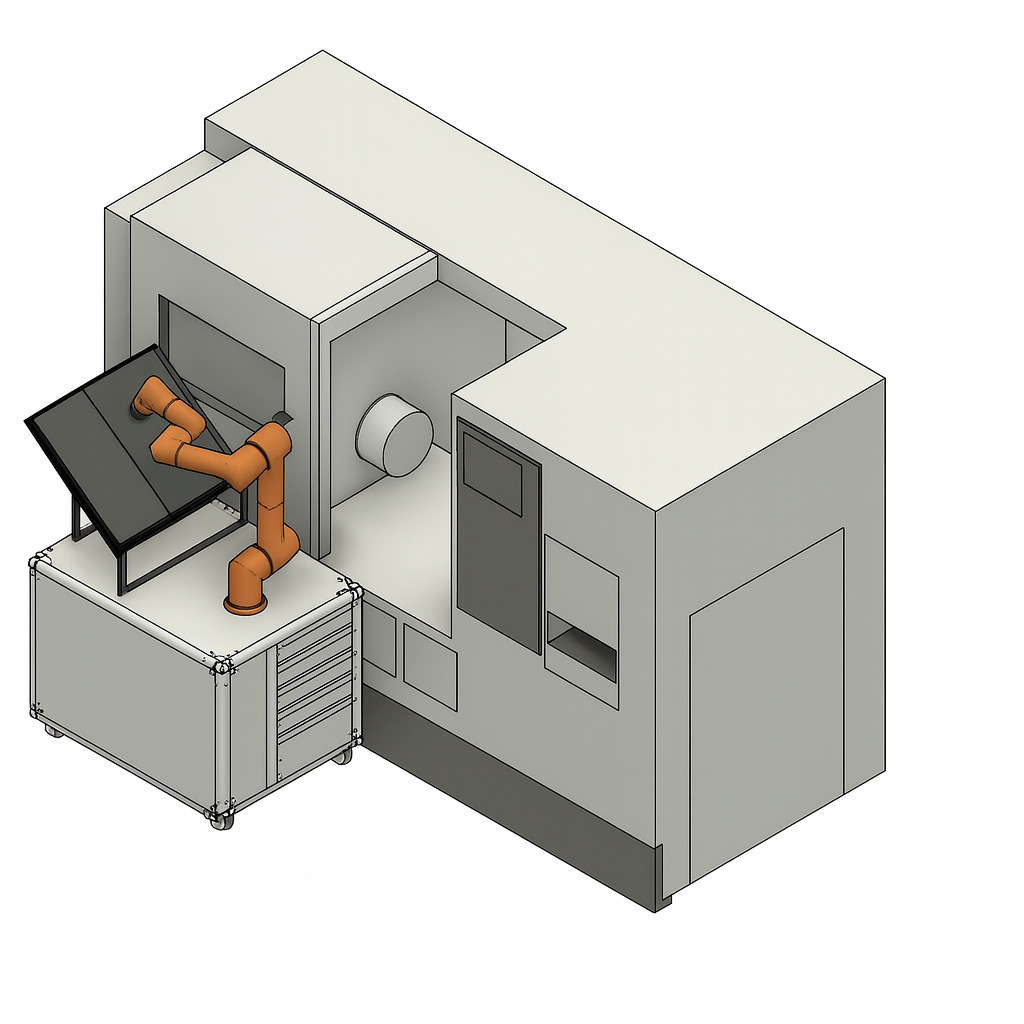
Gemelo Digital
Utilizamos un modelo 3D completo de la celda como gemelo digital para verificar colisiones y validar el diseño antes de la fabricación. Esto nos permitió diseñar componentes a medida con precisión y optimizar el layout de la celda.
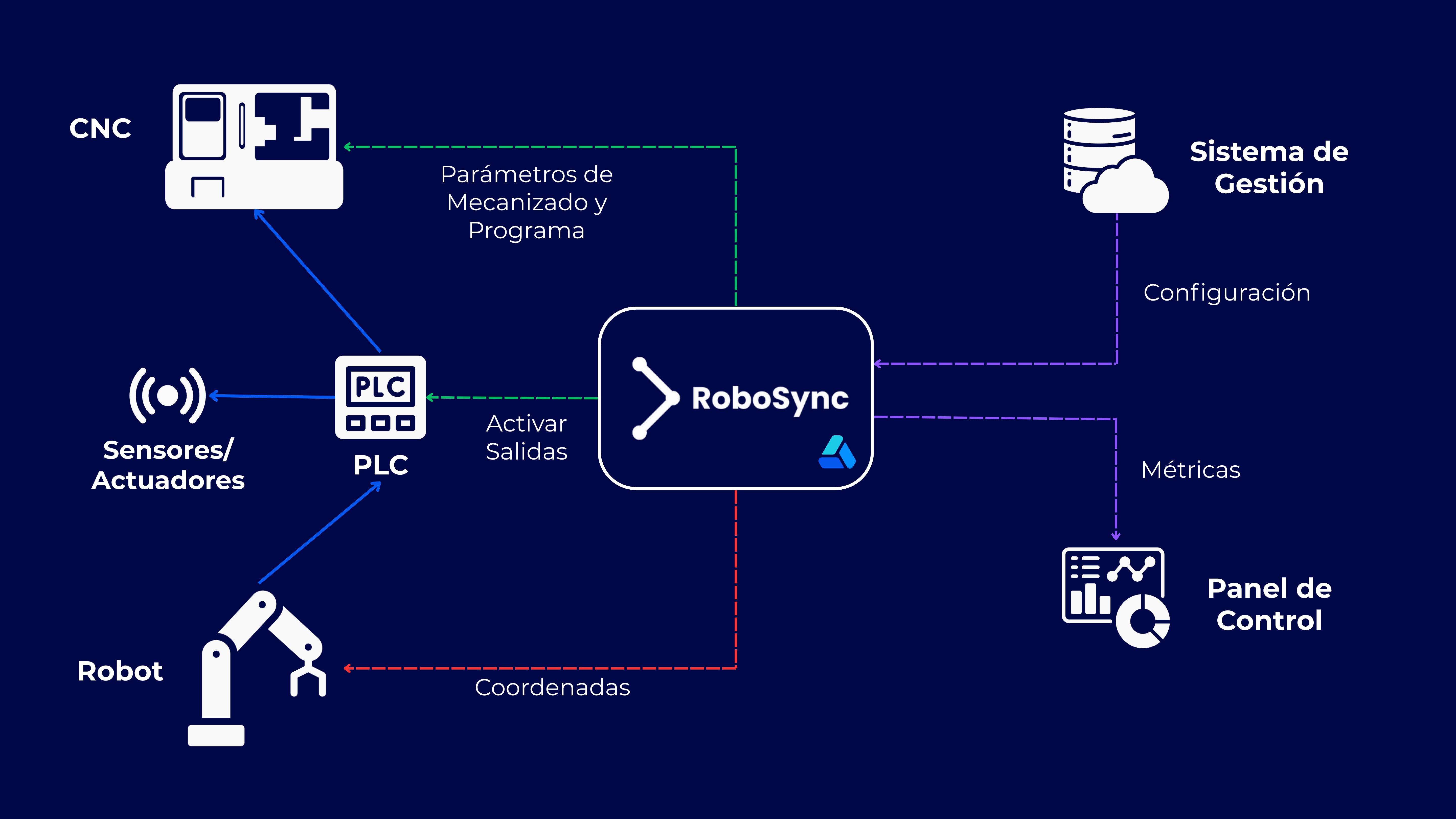
El Software
Robosync es una aplicación construida sobre Sync para comandar robots industriales remotamente, indicándoles la posición que deben ir en tiempo real. Esta capacidad de control remoto y en tiempo real permite coordinar múltiples componentes de manera precisa y sincronizada.
Desarrollamos un sistema que conecta robots y máquinas con plataformas web y sistemas ERP.
De esta forma, la lógica de operación se centraliza, y el robot pasa a desempeñar únicamente el rol de ejecutor, permitiendo construir aplicaciones con mayor flexibilidad y adaptabilidad.
En otras palabras, otorgamos a las máquinas un nivel de inteligencia y autonomía que les permite comunicarse entre sí y con cualquier aplicación que el usuario diseñe.
Estado del Proyecto: Beta en Desarrollo
Este proyecto se encuentra actualmente en desarrollo en una versión beta. Los componentes que alcanzaron mayor desarrollo son:
- Software de integración CNC-cobot
- Control remoto del cobot mediante envío de coordenadas en tiempo real